Grippers boleh dibahagikan kepada beberapa jenis, termasuk elektrik dan pneumatik.Jadi, apakah perbezaan antara penggenggam elektrik dan penggenggam pneumatik?
1: Apakah penggenggam industri?
Penggenggam industri juga dikenali sebagai mekanisme penggenggam mekanikal.Mekanisme penggenggam robot direka mengikut keperluan kerja sebenar dan mempunyai pelbagai bentuk.
Penggenggam mekanikal secara amnya adalah penggenggam dua jari, yang dicirikan oleh sifat gerakan, cengkaman dan mekanisme.Seterusnya, mari kita bercakap tentang beberapa aspek penting.Salah satunya ialah mekanisme penjepit hujung pneumatik, yang dicirikan oleh kelajuan tindakan yang sangat pantas, kecairan berasal dari sistem hidraulik, kehilangan tekanan yang agak kecil, dan sesuai untuk kawalan jarak jauh.Yang kedua ialah mekanisme pengapit hujung sedutan, yang menggunakan daya sedutan cawan sedutan untuk menggerakkan objek.Ia amat sesuai untuk objek dengan peningkatan sederhana dalam nisbah penampilan dan ketebalan, seperti kaca, hanya kertas, dll. Salah satunya ialah mekanisme pengapit hujung hidraulik yang mengapit objek dengan pengapit hidraulik dan pelepasan spring.Tetapi, pada penghujung hari, kuku robot industri boleh membantu kami melakukan kerja kami dengan lebih baik.
2. Perbezaan antara pencengkam elektrik dan pencengkam pneumatik
Berbanding dengan grippers pneumatik, aplikasi grippers elektrik dalam bidang automasi industri mempunyai ciri-ciri berikut:
1), jenis motor elektrik mempunyai mekanisme mengunci sendiri, yang boleh menghalang peralatan bahan kerja daripada rosak akibat kegagalan kuasa.Berbanding dengan grippers pneumatik, ia lebih selamat;
2), pencengkam elektrik mempunyai fungsi kawalan boleh atur cara untuk mencapai kedudukan berbilang titik.Penggenggam pneumatik hanya mempunyai dua hentian, manakala penggenggam elektrik boleh mempunyai lebih daripada 256 hentian.Pecutan dan nyahpecutan jari elektrik boleh dikawal untuk meminimumkan kesan pada bahan kerja.
3), pencengkam elektrik ialah pencengkam fleksibel yang boleh mencapai kawalan daya yang tepat, manakala pencengkam pneumatik adalah proses berayun.Pada dasarnya, terdapat ayunan, yang sukar untuk dihapuskan.Daya pengapit pencengkam elektrik boleh dilaraskan untuk merealisasikan kawalan daya gelung tertutup.Ketepatan daya pengapit boleh mencapai 0.01N, dan ketepatan pengukuran boleh mencapai 0.005mm.Kekuatan dan kelajuan pencengkam pneumatik pada dasarnya tidak boleh dikawal, jadi ia tidak boleh digunakan untuk kerja halus dengan fleksibiliti yang tinggi.
4), isipadu pencengkam elektrik jauh lebih kecil daripada pencengkam pneumatik.Ia juga sangat mudah untuk dipasang.Penyelenggaraan adalah mudah.
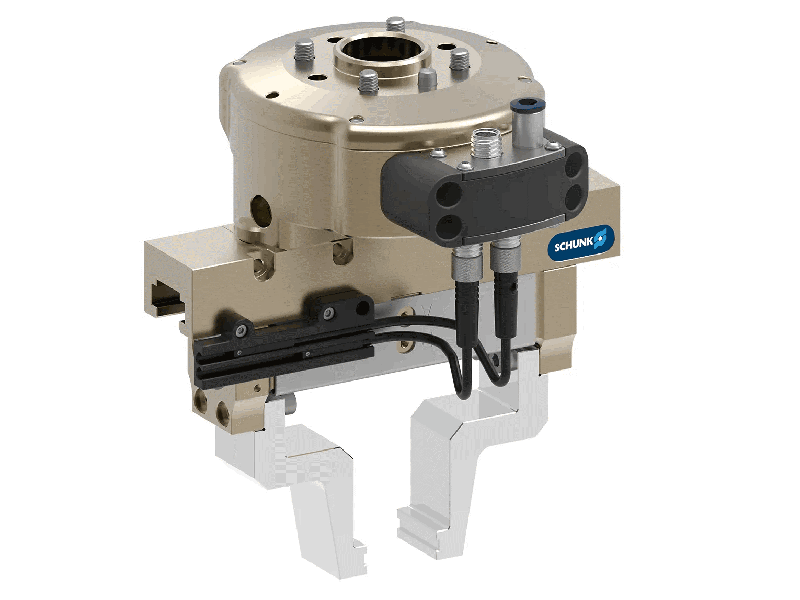
penggenggam pneumatik
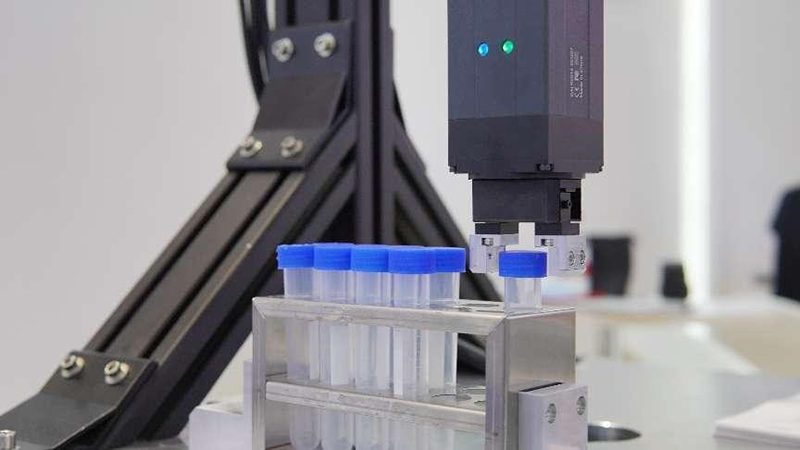 Gripper Elektrik
Gripper Elektrik
3. Kelebihan gripper elektrik
1. Kawal kedudukan rahang
Kedudukan rahang boleh ditentukan dengan menggunakan motor yang dikodkan dan skema kawalan yang sesuai.Sebaliknya, dengan rahang tradisional, ia biasanya perlu untuk menahan pukulan penuh.Apabila menggunakan pencengkam elektrik, gunakan hanya kelegaan yang diperlukan berhampiran bahagian dan kemudian kurangkan perjalanan.Suis bahagian memudahkan pemilihan julat saiz bahagian yang lebih luas tanpa menjejaskan masa kitaran pengeluaran.
2. Kawal cengkaman dan kelajuan
Oleh kerana arus motor adalah berkadar terus dengan tork yang digunakan, adalah mungkin untuk mengawal daya cengkaman yang digunakan.Begitu juga dengan kelajuan menutup.Sebagai contoh, ini mungkin membantu dengan bahagian yang rapuh.
Masa siaran: Dis-19-2022